In this video, we walk you through how a PID controller works and we explain what the P, the I and the D each stand for.
Early multi-boiler machines controlled the brewing temperature with a simple thermostat. The thermostat activated the heating elements when the boiler temperature dropped below a certain point and then turned them off again once it reached the required temperature.
Typically, with espresso machines these two set points are a short distance apart, such that the elements turn on at a lower temperature but don’t turn off until they reach a higher temperature, a little way past the temperature set point. This is an example of the concept known as hysteresis. This results in the continual fluctuation of the temperature around the set point.
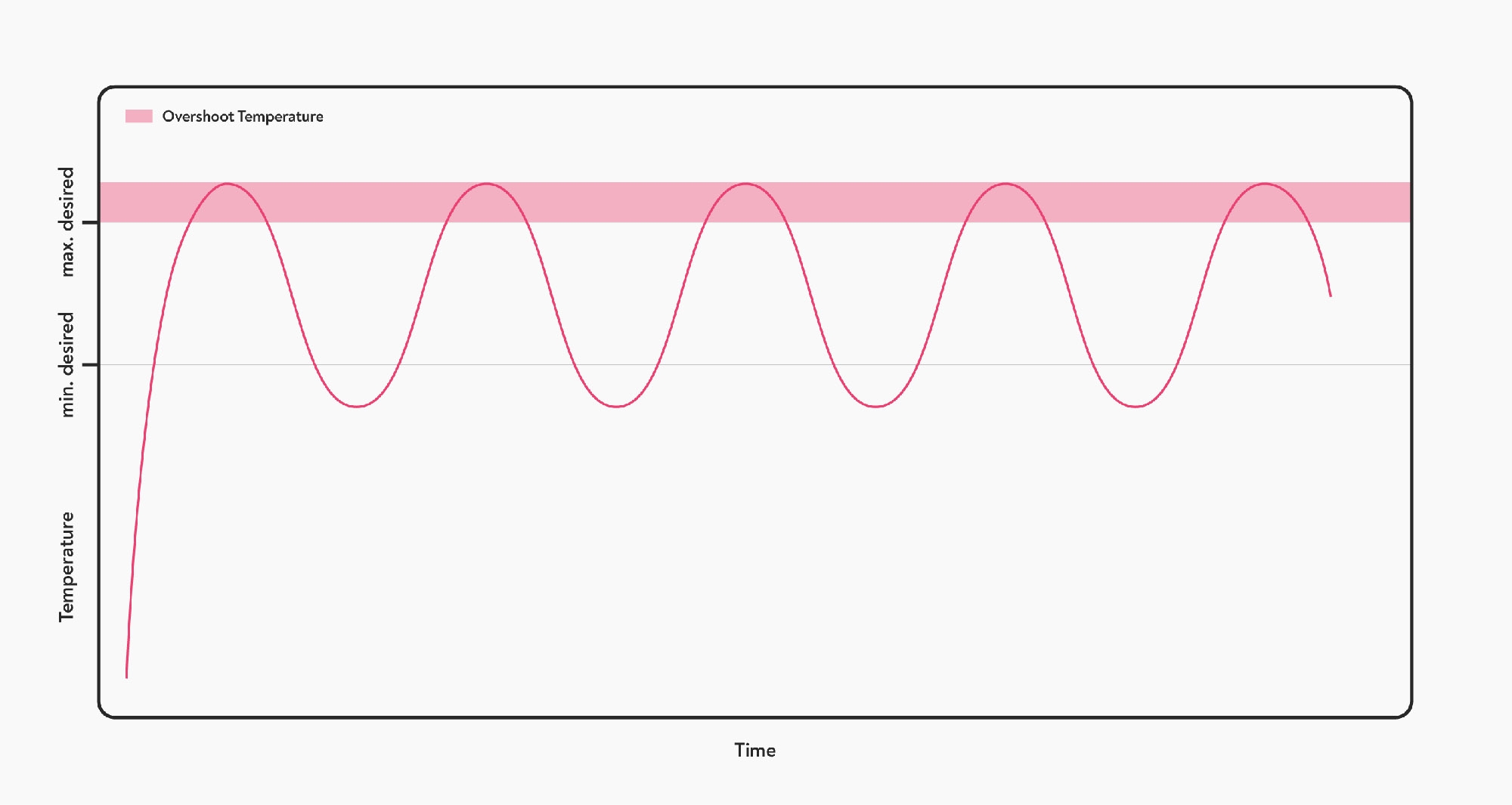 Temperature fluctuations in a boiler controlled with a thermostat.
Temperature fluctuations in a boiler controlled with a thermostat.
The boiler temperature would also continually overshoot the upper set point because at the moment the heating elements are switched off, they are still hot and delivering energy to the water. Once the boiler cools to the minimum temperature, the temperature will also ‘undershoot’ because of the time it takes for the elements to get hot again before they can begin heating the water.
This lag means that even if the upper and lower set points are very close or identical, the temperature will still fluctuate around the set point, limiting the accuracy of a thermostat-controlled system.
The PID (proportional integral derivative) algorithm allows the temperature to be controlled more precisely. Ever since Andy Schecter, Gregory Scace, and David Schomer (see lesson 4.01) retrofitted the first PID controllers to their respective machines, PID controllers have become common on both single- and multi-boiler machines, making the temperature much more stable and easy to control.
PID controllers work by varying the amount of power used, rather than having the elements being either fully on or fully off,